1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
278
279
280
281
282
283
284
285
286
287
288
289
290
291
292
293
294
295
296
297
298
299
300
301
302
303
304
305
306
307
308
309
310
311
312
313
314
315
316
317
318
319
320
321
322
323
324
325
326
327
328
329
330
331
332
333
334
335
336
337
338
339
340
341
342
343
344
345
346
347
348
349
350
351
352
353
354
355
356
357
358
359
360
361
362
363
364
365
366
367
368
369
370
371
372
373
374
375
376
377
378
379
380
381
|
using System;
using System.Threading;
using Microsoft.Win32.SafeHandles;
using vxlapi_NET;
namespace xlCANDemo {
class Class1 {
private static XLDriver CANDemo = new XLDriver();
private static String appName = "xlCANdemoNET";
private static XLClass.xl_driver_config driverConfig = new XLClass.xl_driver_config();
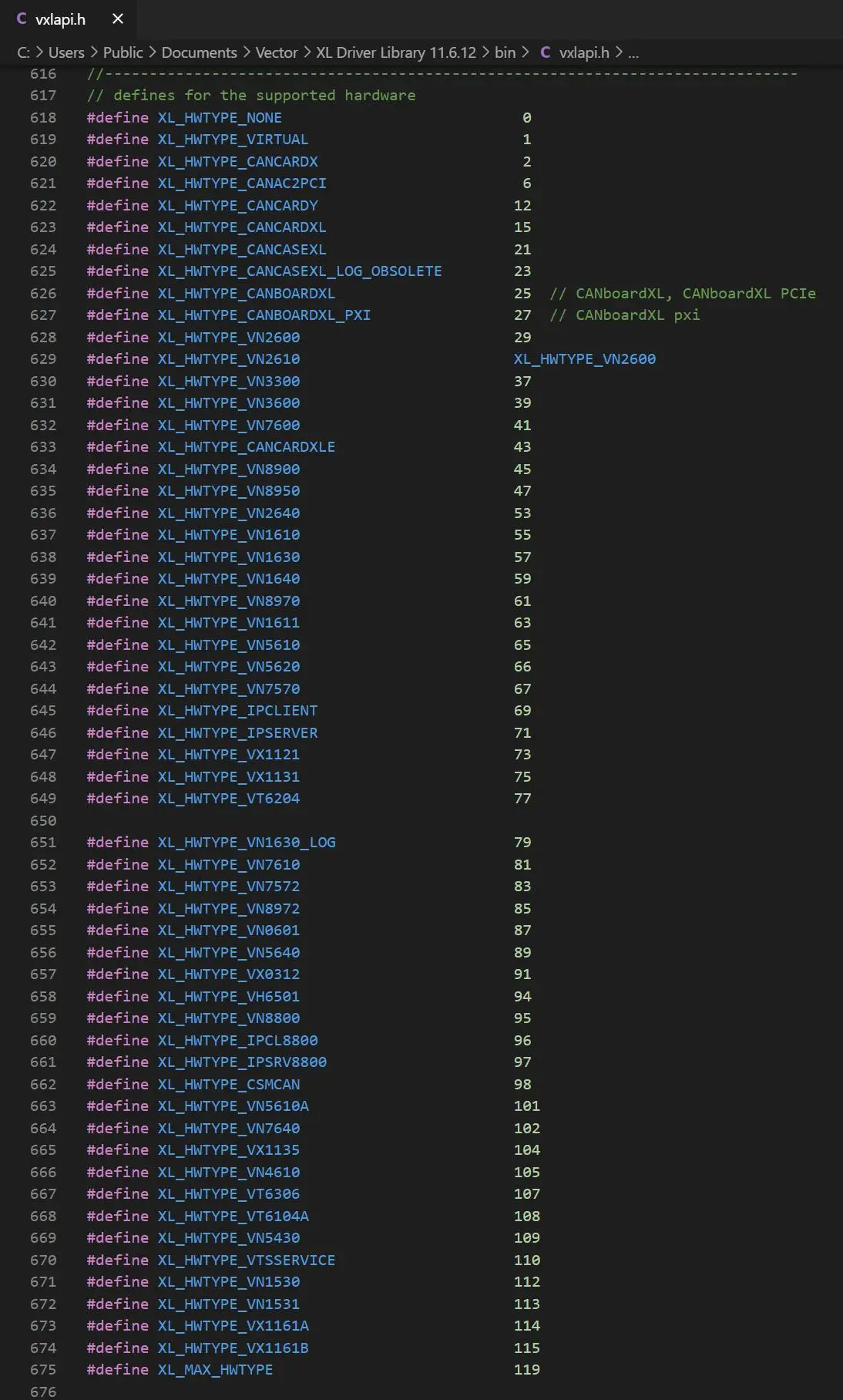
private static XLDefine.XL_HardwareType hwType = XLDefine.XL_HardwareType.XL_HWTYPE_NONE;
private static uint hwIndex = 0;
private static uint hwChannel = 0;
private static int portHandle = -1;
private static UInt64 accessMask = 0;
private static UInt64 permissionMask = 0;
private static UInt64 txMask = 0;
private static UInt64 rxMask = 0;
private static int txCi = -1;
private static int rxCi = -1;
private static EventWaitHandle xlEvWaitHandle = new EventWaitHandle(false, EventResetMode.AutoReset, null);
private static Thread rxThread;
private static bool blockRxThread = false;
[STAThread]
static int Main(string[] args) {
XLDefine.XL_Status status;
Console.WriteLine("-------------------------------------------------------------------");
Console.WriteLine(" xlCANdemo.NET C# V11.6 ");
Console.WriteLine("Copyright (c) 2020 by Vector Informatik GmbH. All rights reserved.");
Console.WriteLine("-------------------------------------------------------------------\n");
Console.WriteLine("vxlapi_NET : " + typeof(XLDriver).Assembly.GetName().Version);
status = CANDemo.XL_OpenDriver();
Console.WriteLine("Open Driver : " + status);
if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError();
status = CANDemo.XL_GetDriverConfig(ref driverConfig);
Console.WriteLine("Get Driver Config : " + status);
if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError();
Console.WriteLine("DLL Version : " + CANDemo.VersionToString(driverConfig.dllVersion));
Console.WriteLine("Channels found : " + driverConfig.channelCount);
for (int i = 0; i < driverConfig.channelCount; i++) {
Console.WriteLine("\n [{0}] " + driverConfig.channel[i].name, i);
Console.WriteLine(" - Channel Mask : " + driverConfig.channel[i].channelMask);
Console.WriteLine(" - Transceiver Name: " + driverConfig.channel[i].transceiverName);
Console.WriteLine(" - Serial Number : " + driverConfig.channel[i].serialNumber);
}
if ((CANDemo.XL_GetApplConfig(appName, 0, ref hwType, ref hwIndex, ref hwChannel, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN) != XLDefine.XL_Status.XL_SUCCESS) ||
(CANDemo.XL_GetApplConfig(appName, 1, ref hwType, ref hwIndex, ref hwChannel, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN) != XLDefine.XL_Status.XL_SUCCESS)) {
CANDemo.XL_SetApplConfig(appName, 0, XLDefine.XL_HardwareType.XL_HWTYPE_NONE, 0, 0, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN);
CANDemo.XL_SetApplConfig(appName, 1, XLDefine.XL_HardwareType.XL_HWTYPE_NONE, 0, 0, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN);
PrintAssignErrorAndPopupHwConf();
}
while (!GetAppChannelAndTestIsOk(0, ref txMask, ref txCi) || !GetAppChannelAndTestIsOk(1, ref rxMask, ref rxCi))
{
PrintAssignErrorAndPopupHwConf();
}
PrintConfig();
accessMask = txMask | rxMask;
permissionMask = accessMask;
status = CANDemo.XL_OpenPort(ref portHandle, appName, accessMask, ref permissionMask, 1024, XLDefine.XL_InterfaceVersion.XL_INTERFACE_VERSION, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN);
Console.WriteLine("\n\nOpen Port : " + status);
if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError();
status = CANDemo.XL_CanRequestChipState(portHandle, accessMask);
Console.WriteLine("Can Request Chip State: " + status);
if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError();
status = CANDemo.XL_ActivateChannel(portHandle, accessMask, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN, XLDefine.XL_AC_Flags.XL_ACTIVATE_NONE);
Console.WriteLine("Activate Channel : " + status);
if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError();
int tempInt = -1;
status = CANDemo.XL_SetNotification(portHandle, ref tempInt, 1);
xlEvWaitHandle.SafeWaitHandle = new SafeWaitHandle(new IntPtr(tempInt), true);
Console.WriteLine("Set Notification : " + status);
if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError();
status = CANDemo.XL_ResetClock(portHandle);
Console.WriteLine("Reset Clock : " + status + "\n\n");
if (status != XLDefine.XL_Status.XL_SUCCESS) PrintFunctionError();
Console.WriteLine("Start Rx thread...");
rxThread = new Thread(new ThreadStart(RXThread));
rxThread.Start();
Console.WriteLine("Press <ENTER> to transmit CAN messages \n <b>, <ENTER> to block Rx thread for rx-overrun-test \n <B>, <ENTER> burst of CAN TX messages \n <x>, <ENTER> to exit");
while (true) {
if (blockRxThread) Console.WriteLine("Rx thread blocked.");
string str = Console.ReadLine();
if (str == "b") blockRxThread = !blockRxThread;
else if (str == "B") {
for (int i = 0; i < 1000; i++) {
CANTransmitDemo();
}
}
else if (str == "x") break;
else {
CANTransmitDemo();
}
}
rxThread.Abort();
Console.WriteLine("Close Port : " + CANDemo.XL_ClosePort(portHandle));
Console.WriteLine("Close Driver : " + CANDemo.XL_CloseDriver());
return 0;
}
private static int PrintFunctionError() {
Console.WriteLine("\nERROR: Function call failed!\nPress any key to continue...");
Console.ReadKey();
return -1;
}
private static void PrintConfig() {
Console.WriteLine("\n\nAPPLICATION CONFIGURATION");
foreach (int channelIndex in new int[] {txCi, rxCi}) {
Console.WriteLine("-------------------------------------------------------------------");
Console.WriteLine("Configured Hardware Channel : " + driverConfig.channel[channelIndex].name);
Console.WriteLine("Hardware Driver Version : " + CANDemo.VersionToString(driverConfig.channel[channelIndex].driverVersion));
Console.WriteLine("Used Transceiver : " + driverConfig.channel[channelIndex].transceiverName);
}
Console.WriteLine("-------------------------------------------------------------------\n");
}
private static void PrintAssignErrorAndPopupHwConf() {
Console.WriteLine("\nPlease check application settings of \"" + appName + " CAN1/CAN2\",\nassign them to available hardware channels and press enter.");
CANDemo.XL_PopupHwConfig();
Console.ReadKey();
}
private static bool GetAppChannelAndTestIsOk(uint appChIdx, ref UInt64 chMask, ref int chIdx)
{
XLDefine.XL_Status status = CANDemo.XL_GetApplConfig(appName, appChIdx, ref hwType, ref hwIndex, ref hwChannel, XLDefine.XL_BusTypes.XL_BUS_TYPE_CAN);
if (status != XLDefine.XL_Status.XL_SUCCESS)
{
Console.WriteLine("XL_GetApplConfig : " + status);
PrintFunctionError();
}
chMask = CANDemo.XL_GetChannelMask(hwType, (int)hwIndex, (int)hwChannel);
chIdx = CANDemo.XL_GetChannelIndex(hwType, (int)hwIndex, (int)hwChannel);
if (chIdx < 0 || chIdx >= driverConfig.channelCount)
{
return false;
}
return (driverConfig.channel[chIdx].channelBusCapabilities & XLDefine.XL_BusCapabilities.XL_BUS_ACTIVE_CAP_CAN) != 0;
}
public static void CANTransmitDemo() {
XLDefine.XL_Status txStatus;
XLClass.xl_event_collection xlEventCollection = new XLClass.xl_event_collection(2);
xlEventCollection.xlEvent[0].tagData.can_Msg.id = 0x100;
xlEventCollection.xlEvent[0].tagData.can_Msg.dlc = 8;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[0] = 1;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[1] = 2;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[2] = 3;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[3] = 4;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[4] = 5;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[5] = 6;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[6] = 7;
xlEventCollection.xlEvent[0].tagData.can_Msg.data[7] = 8;
xlEventCollection.xlEvent[0].tag = XLDefine.XL_EventTags.XL_TRANSMIT_MSG;
xlEventCollection.xlEvent[1].tagData.can_Msg.id = 0x200;
xlEventCollection.xlEvent[1].tagData.can_Msg.dlc = 8;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[0] = 9;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[1] = 10;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[2] = 11;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[3] = 12;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[4] = 13;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[5] = 14;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[6] = 15;
xlEventCollection.xlEvent[1].tagData.can_Msg.data[7] = 16;
xlEventCollection.xlEvent[1].tag = XLDefine.XL_EventTags.XL_TRANSMIT_MSG;
txStatus = CANDemo.XL_CanTransmit(portHandle, txMask, xlEventCollection);
Console.WriteLine("Transmit Message : " + txStatus);
}
public static void RXThread() {
XLClass.xl_event receivedEvent = new XLClass.xl_event();
XLDefine.XL_Status xlStatus = XLDefine.XL_Status.XL_SUCCESS;
while (true) {
if (xlEvWaitHandle.WaitOne(1000)) {
xlStatus = XLDefine.XL_Status.XL_SUCCESS;
while (xlStatus != XLDefine.XL_Status.XL_ERR_QUEUE_IS_EMPTY) {
while (blockRxThread) { Thread.Sleep(1000); }
xlStatus = CANDemo.XL_Receive(portHandle, ref receivedEvent);
if (xlStatus == XLDefine.XL_Status.XL_SUCCESS) {
if ((receivedEvent.flags & XLDefine.XL_MessageFlags.XL_EVENT_FLAG_OVERRUN) != 0) {
Console.WriteLine("-- XL_EVENT_FLAG_OVERRUN --");
}
if (receivedEvent.tag == XLDefine.XL_EventTags.XL_RECEIVE_MSG) {
if ((receivedEvent.tagData.can_Msg.flags & XLDefine.XL_MessageFlags.XL_CAN_MSG_FLAG_OVERRUN) != 0) {
Console.WriteLine("-- XL_CAN_MSG_FLAG_OVERRUN --");
}
if ((receivedEvent.tagData.can_Msg.flags & XLDefine.XL_MessageFlags.XL_CAN_MSG_FLAG_ERROR_FRAME)
== XLDefine.XL_MessageFlags.XL_CAN_MSG_FLAG_ERROR_FRAME) {
Console.WriteLine("ERROR FRAME");
}
else if ((receivedEvent.tagData.can_Msg.flags & XLDefine.XL_MessageFlags.XL_CAN_MSG_FLAG_REMOTE_FRAME)
== XLDefine.XL_MessageFlags.XL_CAN_MSG_FLAG_REMOTE_FRAME) {
Console.WriteLine("REMOTE FRAME");
}
else {
Console.WriteLine(CANDemo.XL_GetEventString(receivedEvent));
}
}
}
}
}
}
}
}
}
|